Stock Code: 831045
Industrial Automation & Intelligence Solutions
SUMMERY: Como parte importante de la automatización de la soldadura moderna, el brazo robótico de soldadura se usa ampliamente en muchos campos, como la fabricación de automóviles, la industria aeroespacial, la construcción naval y la industria p...
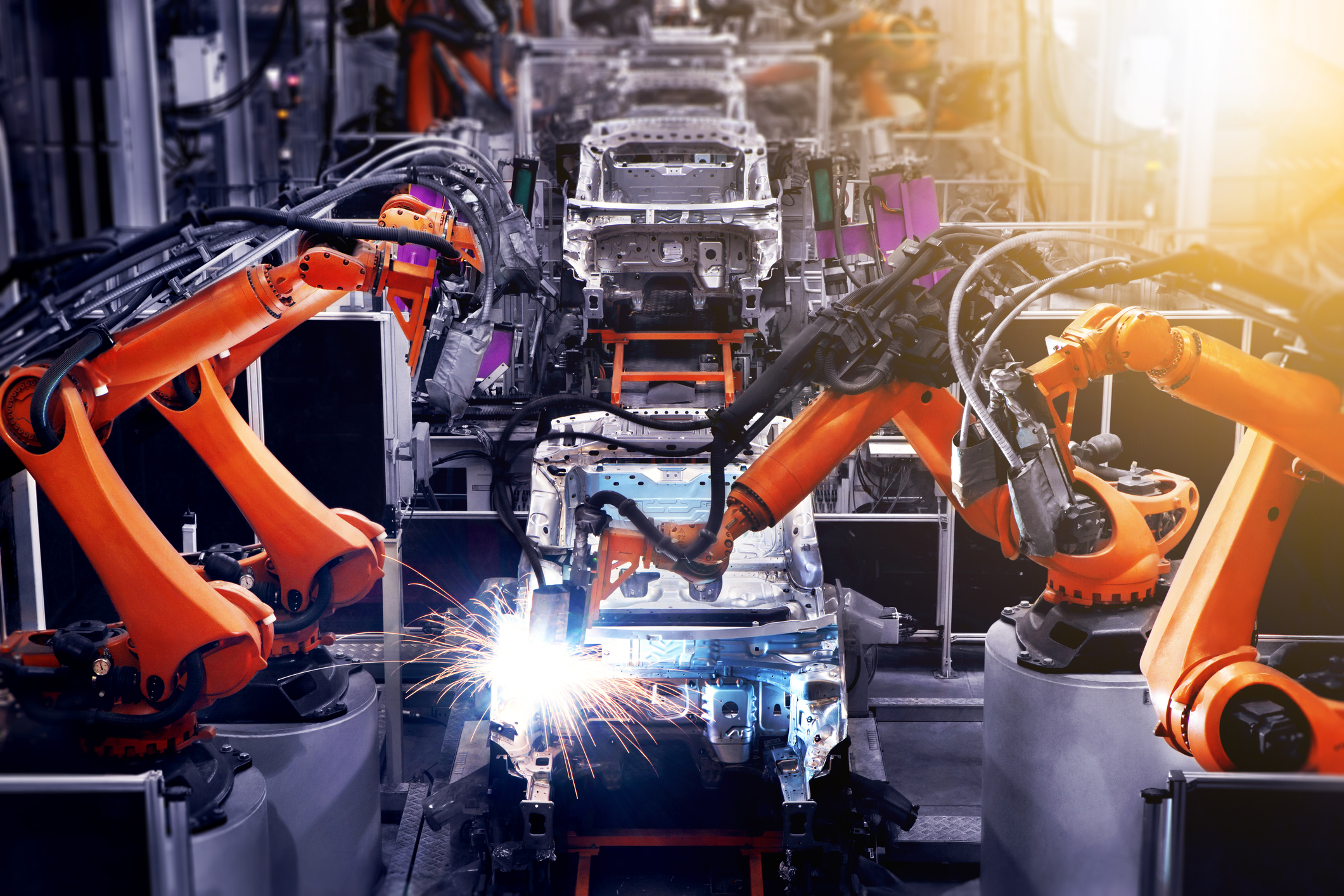
Como parte importante de la automatización de la soldadura moderna, el brazo robótico de soldadura se usa ampliamente en muchos campos, como la fabricación de automóviles, la industria aeroespacial, la construcción naval y la industria pesada por sus capacidades de soldadura eficientes y precisas. Comprender la estructura, el modo de movimiento y el mecanismo de trabajo del brazo robótico de soldadura ayudará a comprender su potencial de aplicación y sus ventajas técnicas en la producción industrial.

La máquina de soldadura con brazo robótico se compone principalmente de varios componentes clave, que incluyen:
Brazo robótico: generalmente se compone de múltiples articulaciones, la mayoría de las cuales son brazos robóticos de 3 y 6 ejes en el mercado, con diferentes grados de libertad y pueden moverse de manera flexible en el espacio tridimensional. El diseño del brazo robótico generalmente utiliza aleación de aluminio o acero para garantizar una resistencia y rigidez suficientes al tiempo que reduce su propio peso.
Herramientas de soldadura: incluidas las pistolas de soldadura, las boquillas y los electrodos, son componentes clave en el proceso de soldadura. La elección de las herramientas de soldadura depende del método de soldadura (como soldadura por arco, soldadura láser, etc.) y del tipo de material.
Sistema de accionamiento: incluye principalmente motores, reductores y dispositivos de transmisión, que son responsables de impulsar el movimiento del brazo robótico. Los motores se pueden dividir en servomotores y motores paso a paso. Los servomotores se utilizan ampliamente en robots de soldadura por su alta precisión y alta capacidad de respuesta.
Sistema de control: generalmente compuesto por PLC (controlador lógico programable) o computadora industrial, responsable del control de movimiento, planificación de trayectoria y ajuste de parámetros de soldadura del brazo robótico.
Los modos de movimiento del brazo robótico de soldadura incluyen principalmente:
Movimiento lineal: el brazo robótico de soldadura puede moverse a lo largo de una trayectoria recta, lo que es adecuado para tareas de soldadura simples. Por ejemplo, en el proceso de soldadura de una soldadura recta larga, el movimiento lineal del brazo puede lograr una soldadura uniforme.
Movimiento rotacional: a través de la rotación de las juntas, el brazo robótico puede realizar movimientos rotacionales complejos en el espacio para adaptarse a las necesidades de soldadura de diferentes ángulos y posiciones. Este modo de movimiento permite que el robot opere de manera flexible en un espacio tridimensional complejo y es particularmente adecuado para aplicaciones que requieren soldadura de múltiples ángulos.
Movimiento compuesto: Al combinar movimientos lineales y rotatorios, el brazo robótico de soldadura puede realizar trayectorias de soldadura complejas, como soldaduras curvas o circulares. Este modo de movimiento puede mejorar significativamente la eficiencia y la calidad de la soldadura.
El mecanismo de trabajo de la máquina de soldadura con brazo robótico incluye los siguientes pasos clave:
Planificación de la trayectoria: Antes de comenzar la soldadura, el sistema de control realiza la planificación de la trayectoria de acuerdo con los requisitos de la tarea de soldadura. La planificación de la trayectoria debe considerar factores como la forma de la soldadura, la posición, la velocidad y la secuencia de soldadura.
Control de movimiento: Una vez completada la planificación de la trayectoria, el sistema de control controla el sistema de accionamiento para impulsar el brazo robótico para que se mueva a lo largo de la trayectoria predeterminada emitiendo instrucciones. El control de movimiento debe monitorear la posición y la velocidad del proceso de soldadura en tiempo real para garantizar la calidad de la soldadura.
Operación de soldadura: Durante el proceso de soldadura, la herramienta de soldadura transferirá corriente al material de soldadura, fundirá el metal a través del arco u otros métodos de calentamiento y logrará la soldadura. El robot de soldadura puede ajustar los parámetros de soldadura como la corriente, la velocidad de soldadura y el ángulo de soldadura de acuerdo con la retroalimentación en tiempo real para optimizar el efecto de la soldadura.
Monitoreo y retroalimentación: El robot de soldadura está equipado con sensores que pueden monitorear la temperatura, el estado del baño de fusión y la calidad de la soldadura en tiempo real durante el proceso de soldadura. A través del sistema de retroalimentación, el robot puede ajustar automáticamente los parámetros durante el proceso de soldadura para garantizar la estabilidad y la consistencia de la soldadura.
La estructura, el modo de movimiento y el mecanismo de trabajo del brazo robótico de soldadura determinan conjuntamente su alta eficiencia y confiabilidad en la producción industrial. A través de una planificación precisa de la ruta, un control de movimiento flexible y una operación de soldadura inteligente, el brazo robótico de soldadura desempeñará un papel más importante en más campos y brindará un fuerte apoyo para el desarrollo de la industria manufacturera moderna.